Ich habe mich dazu entschlossen einen Quadcopter zu bauen. Im Moment befindet sich die Lieferung der Einzelteile noch auf dem Weg, weswegen ich in diesem Beitrag kurz über das schreiben wollte, was ich bis zum Bau des Quadcopters so treibe.
Als erstes habe ich mir eine neue Funke gekauft. Bisher hatte ich eine MX-12 im Einsatz um verschiedene Depron Flieger zu steuern. Diese ist aber eine ältere Generation und funktioniert noch nicht mit der 2,4Ghz Technologie. Also musste eine neue her, am Besten auch mit etwas mehr kanälen, wer weiss, was in Zukunft noch so ansteht.
Ich habe mir nach kurzem Überlegen eine Graupner MX-16 Hott gekauft. Diese hat 8 Kanäle, 2,4Ghz und jede Menge Schnickschnack an Bord. Zuerst hatte ich mit einer Spektrum DX9 geliebäugelt, diese aber auf Grund von diversen Beiträgen die von Problemen handelten dann doch nicht genommen. Außerdem war diese um einiges teurer als die MX-16.
Nach dem ich die MX-16 Hott geliefert bekommen habe wurde gleich ein Update der Firmware auf dem Sender und auf dem Empfänger durchgeführt. Sicher ist bekanntlich sicher.
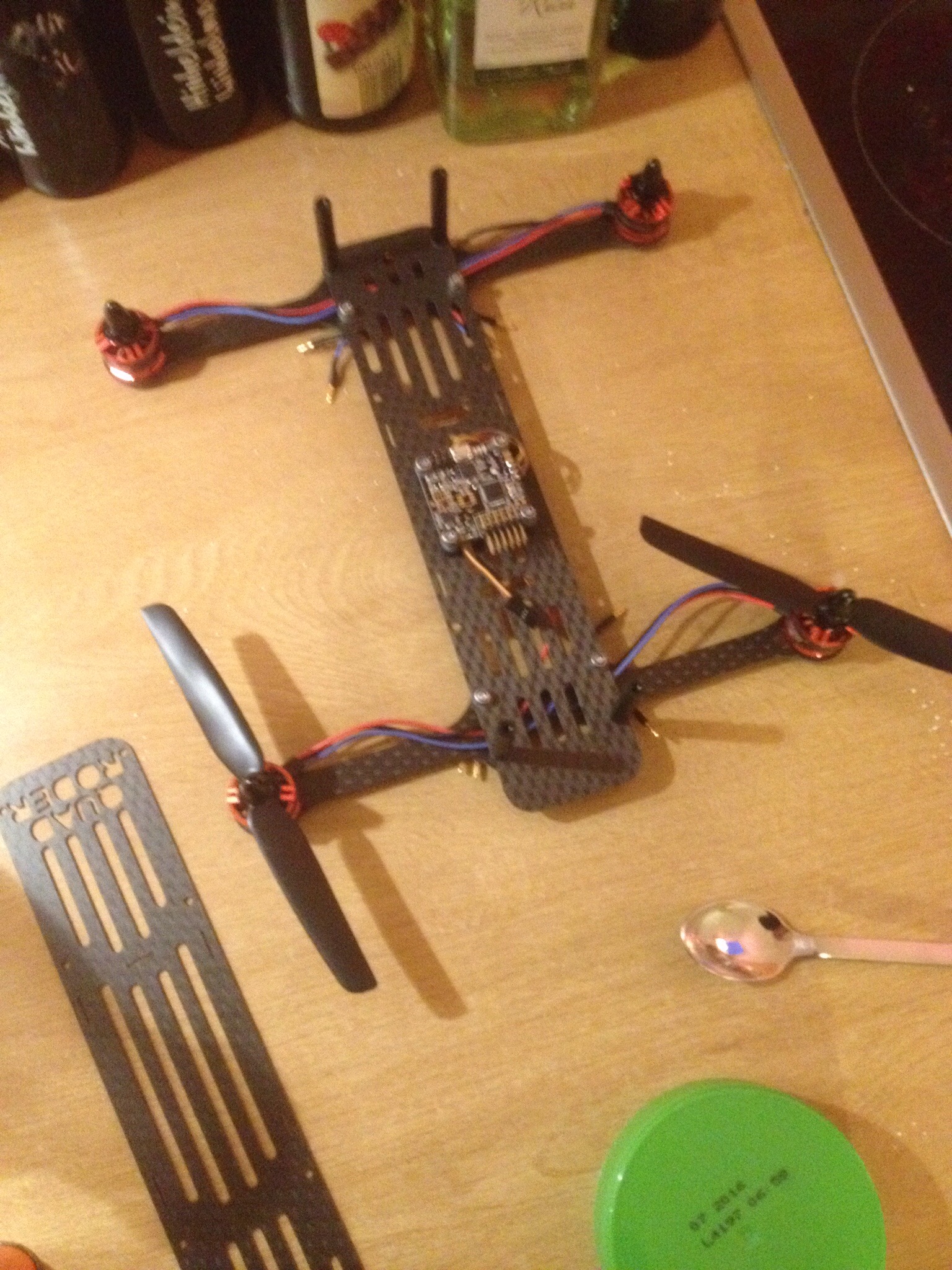
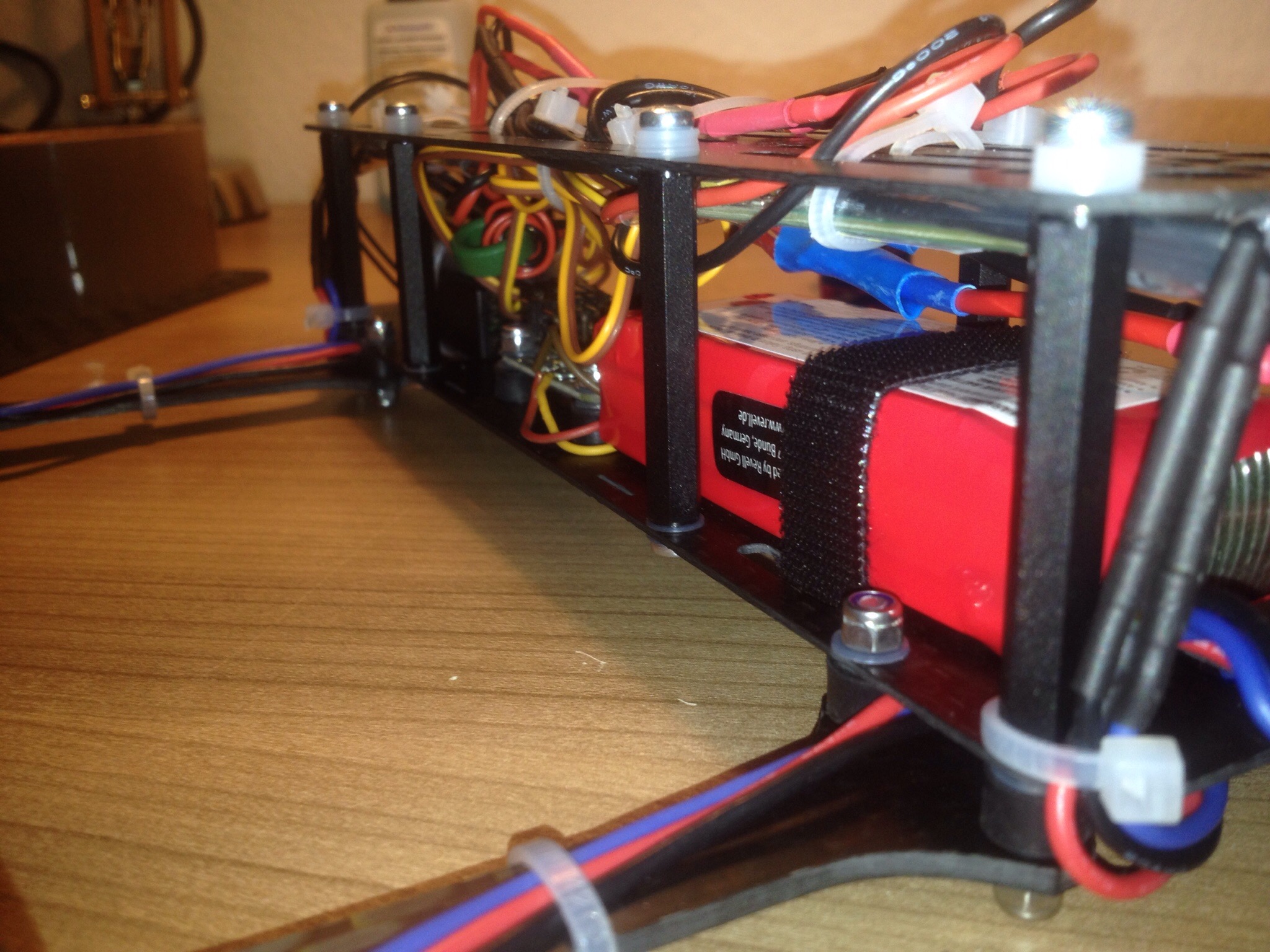
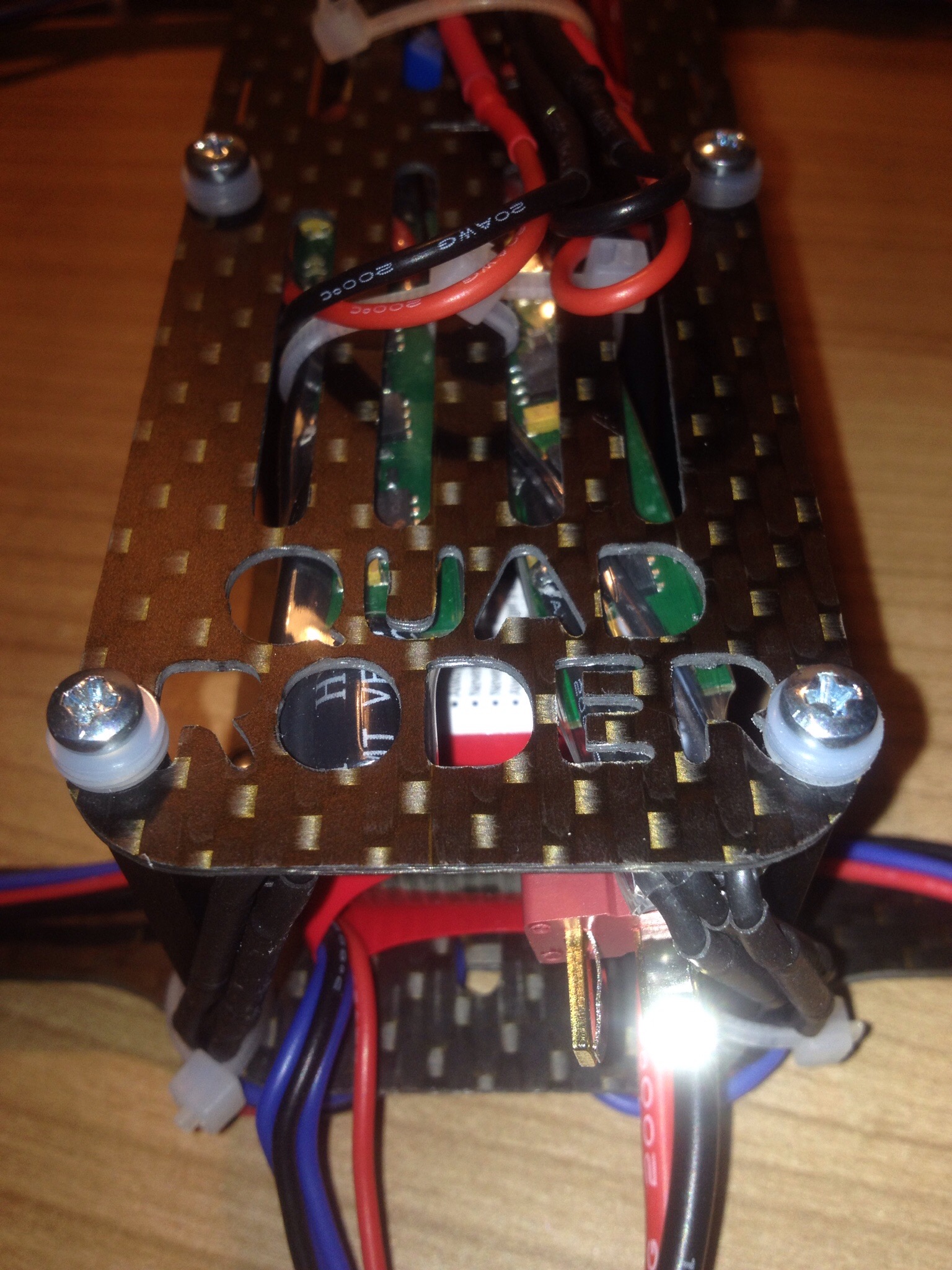
Da die Lieferung der Elektronik noch auf sich warten lässt habe ich mich um das Design des Quadcopters gekümmert, das ich hier zeigen werde, wenn ich den Rahmen fräse.
Damit meine ersten Ausflüge nicht gleich einen Crash zur Folge haben sollten, habe ich mich mal wieder mit dem Thema Flugsimulator beschäftigt. Da hat sich in den letzten Jahren so einiges getan. Als ich dann aber nach einer einfachen Möglichkeit zum trainieren mit meiner Funke gesucht habe biss ich aber vorerst einmal auf Granit.
Ich erinnere mich noch daran, wie ich früher eine Monoklinke zusammengeschraubt habe und meine alte Funke direkt über den DSC Ausgang mit der Soundkarte verbunden hatte und die Signale dann per PPJoy auf einen Virtuellen Joystick umrechnen lies. Das war ein ziemliches gefummel, funktionierte aber irgendwie, wenn auch nicht 100% sauber.
Nach den Monoklinke Versuchen hatte ich damals noch ein DSC to USB Konverter, der etwas besser funktionierte. Nervig war aber immer noch das Kabel der Fernbedienung am Sender zum Computer. Das knickte nämlich immer schön ab, wenn man vor dem Laptop / Computer saß und im Flugsimulator mitfieberte, bevor man den Vogel vom Himmel holte.
Mit so einer modernen MX-16 Hott müsste es doch in der heutigen Zeit etwas komfortabler sein dachte ich mir, zumal die Fernbedienung bidirektionale Datenübertragung zwischen Sender und Empfänger beherrscht, sowie Audiofiles über Bluetooth übertragen kann.
Nach etwas Recherche kam ich zu dem Ergebnis, dass es ohne Zusatzhardware einfach nicht funktionieren wird, also habe ich mir wohl oder über wieder einen DSC to USB Konverter gekauft. Diesen soll man aber tunlichst nicht an der MX-16 Hott betreiben, sonst kann es passieren, dass man die Funke nur noch als Türstopper verwenden kann. Schönen Dank auch. Etliche Seiten später fand ich dann aber noch eine Lösung, die nach meinem Geschmack war. Hardware kaufen -> Hardware aufmachen -> Hardware umlöten -> anschließen -> geht. Genau mein Geschmack!
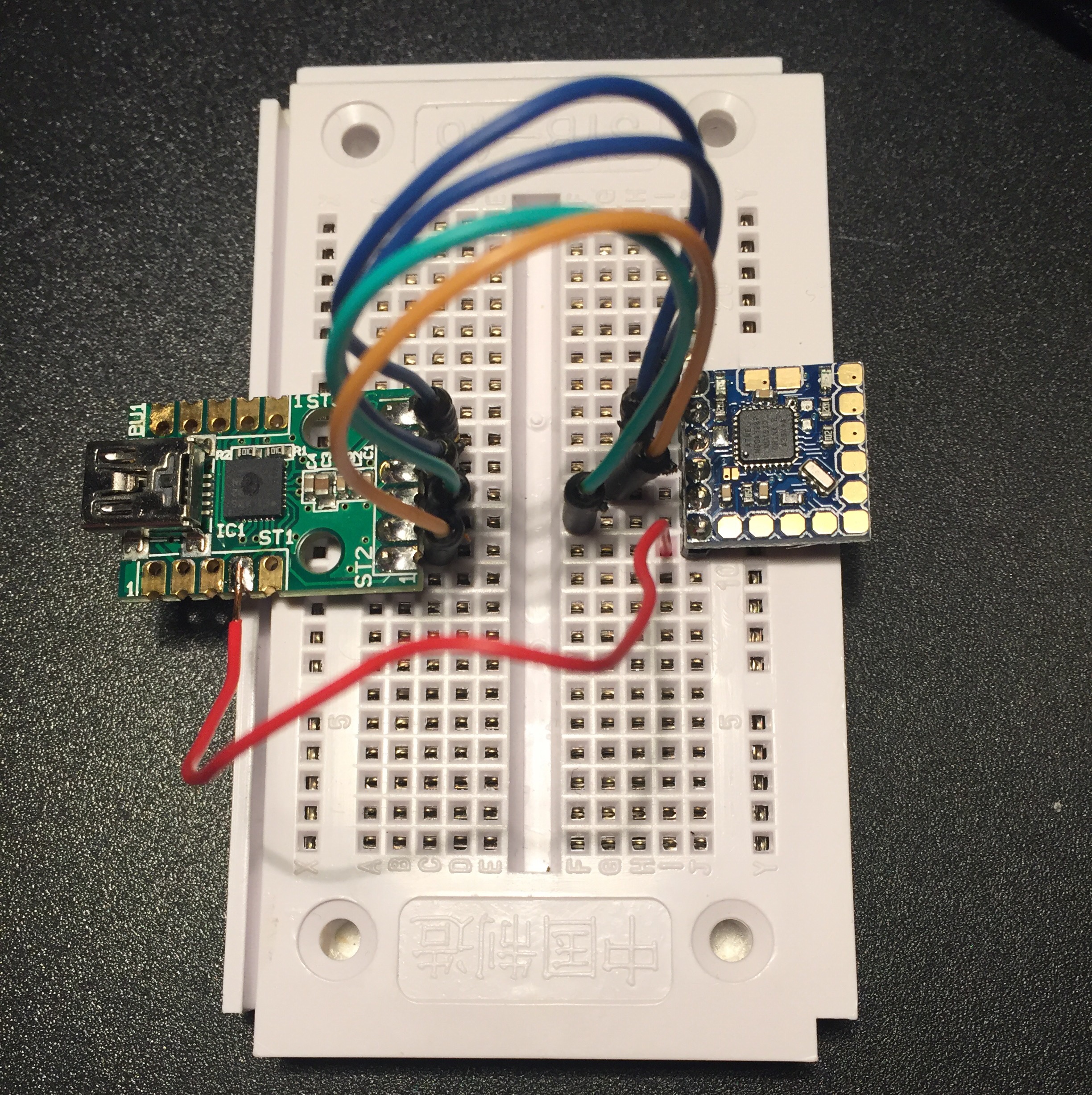
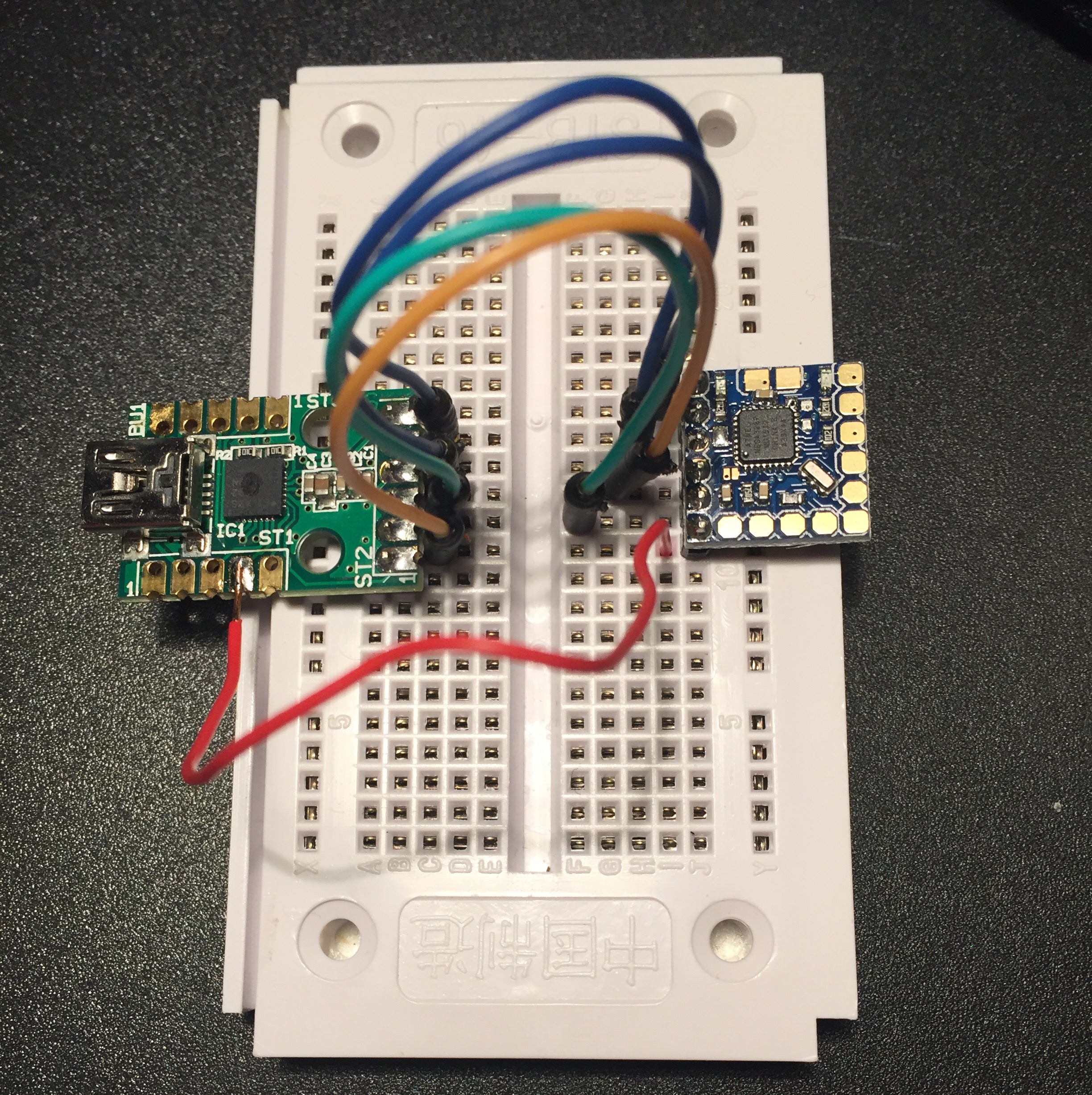
Ich bestellte also einen Konverter auf Ebay (bitte keinen 4 Kanal Konverter kaufen, das braucht ja kein Mensch!). Als dieser ankam wurde er ausgepackt und ich lötete als erstes das Kabel das vom USB Teil des Konverter weg geht ab. Nun kann man einen einfachen Servostecker (Graupner JR) nehmen und diesen wie folgt anlöten.
Der Pluspol aus der Mitte des Steckers kommt an +5V am USB Teil
Der Massepol (meist Braun, oder Schwarz) kommt an den Masseanschluss des USB Teils
Der Signalpol (war bei mir Weiß) kommt an den Punkt, wo das vorher abgelötete Kabel angeschlossen war.
Wenn die Lötarbeiten abgeschlossen sind genügt es in den Einstellungen der Fernbedienung die Übertragung auf Summenkanal umzustellen, schon kann man das neu erworbene und umgebaute DSC to USB Teil direkt am Computer mit dem Empfänger verwenden. Kein Kabel, keine zusätzliche Batterie, viel Spaß!
Hier noch ein paar Bilder von dem neuen USB Teil