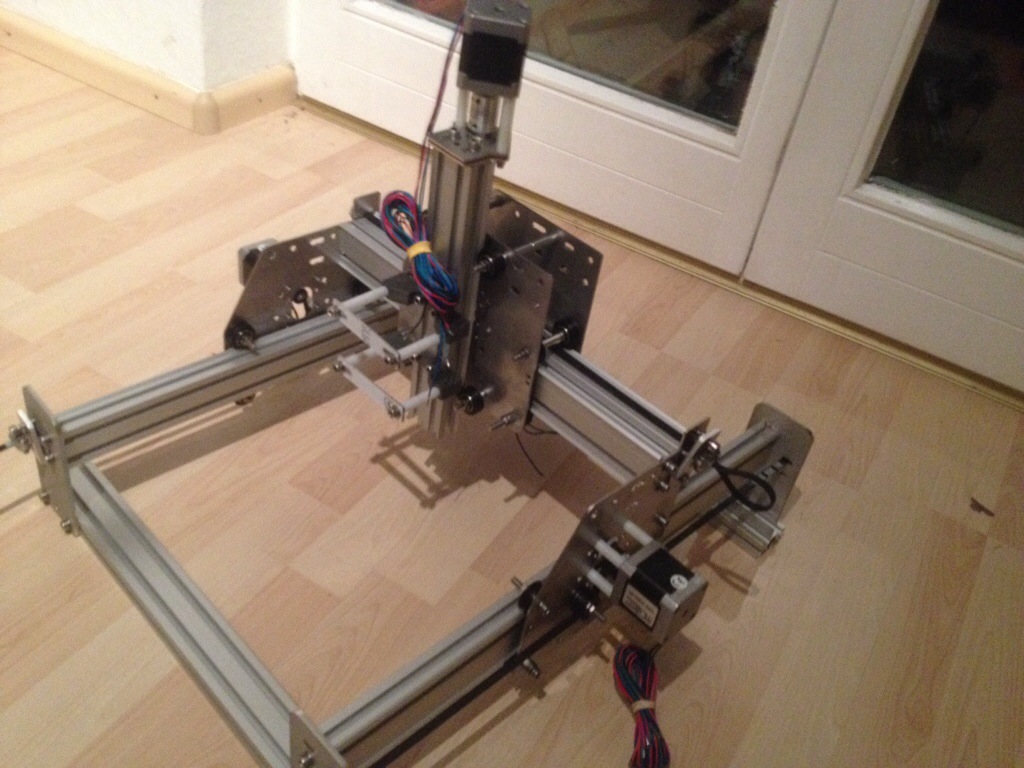
Nach dem ich immer noch auf meine Platine aus der USA warte und diese aller Voraussicht nach auch nicht in den nächsten Tagen eintreffen wird habe ich mich dazu entschlossen eine zweite Platine zu bestellen. Diese Platine nennt sich Gaups und ist ebenfalls von Amberspyglass (eshspeoko) und basiert auf der buildlog.net Platine. Diese ist allerdings von Grund auf neu designed und sieht gut aus. Somit werde ich die Buildlog.net Platine, sofern sie dieses Jahrhundert noch eintrifft auf ebay verhöckern. Da meine Fräse bereits fertig aufgebaut ist und ich nicht länger warten wollte habe ich meine Pololu Schrittmotortreiber auf dem Breadboard von Hand verkabelt. Nach dem die Verkabelung fertig war ging es an die GRBL Settings.
Es gibt ein paar gute Online Rechner um die Grbl Einstellungen zu berechnen. Damit die Einstellungen korrekt berechnet werden können muss man herausfinden, welche Strecke die Fräse pro Schritt zurück legt.
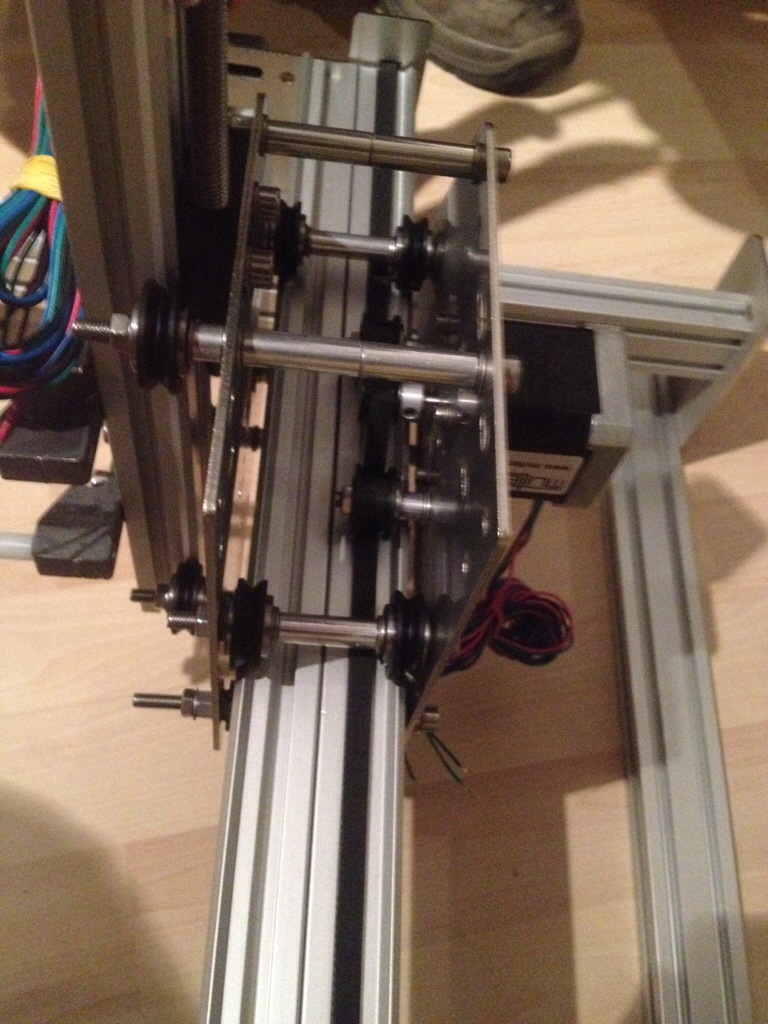
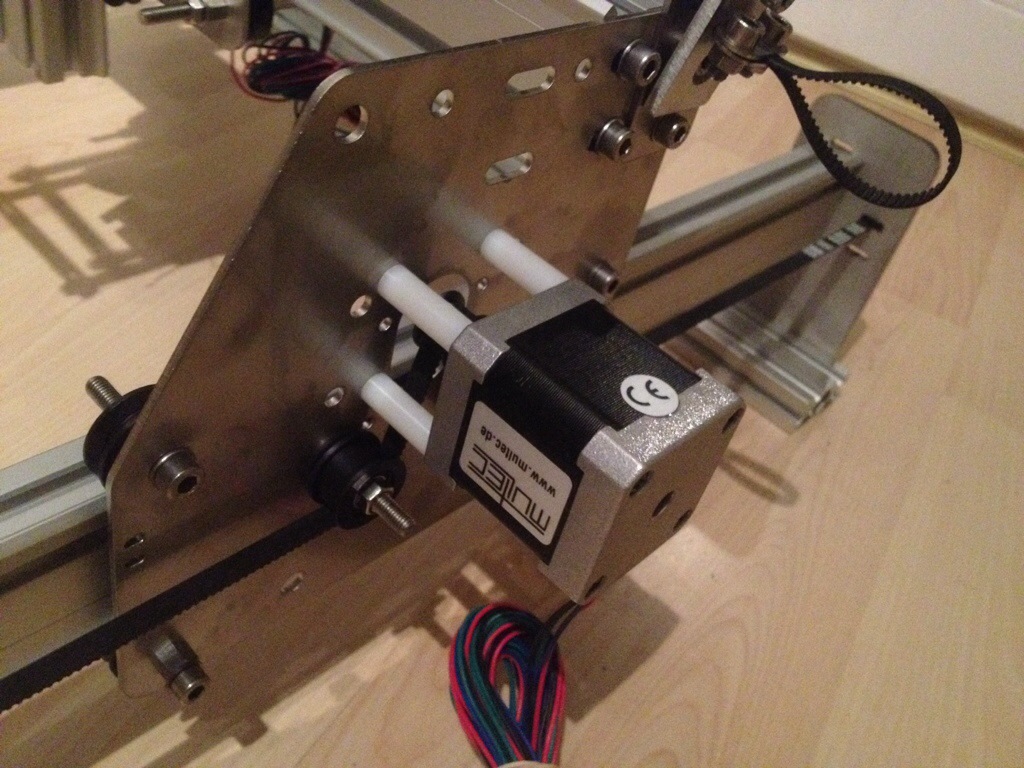
Die eShapeOko läuft auf MXL Zahnriemen. Diese haben eine Steigung von 0,08inch. Die Zahnräder haben 18 Zähne und die der Motor benötigt mit seinen 1,9 Grad pro Schritt insgesamt 200 Schritte für eine volle Umdrehung. Damit kann man die Einstellung für Grbl relativ einfach berechnen.
Das gleiche gilt für die Z-Achse, die mit einem M8 Gewindestab ausgestattet ist. Hier kann man die Steigung einfach googeln und dies ebenfalls in den Grbl Rechner eintragen.
Nach dem man die korrekten Settings hat geht es noch an die Feed, Seek und Acceleration Parameter. Diese sollte man in kleinen Schritten erhöhen bis man mit den Werten zufrieden ist und die Fräse zufriedenstellend läuft.
Sobald ich meine optimalen Werte habe werde ich diese hier veröffentlichen. Im Moment habe ich für Feed und Seek jeweils 500, sowie für Acceleration 50. die Fräse läuft mit 8 Microsteps auf X und Y schon angenehm ruhig, aber sie könnte noch etwas mehr pfiff für Trockenfahrten habe :).
Ich denke, dass die Gaups Platine in der nächsten Woche kommen wird, dann gibt es wider ein Update. Ein entsprechendes Video von meiner ersten Testfahrt gibt es hier: http://m.youtube.com/watch?v=iNzlc67y-Ec
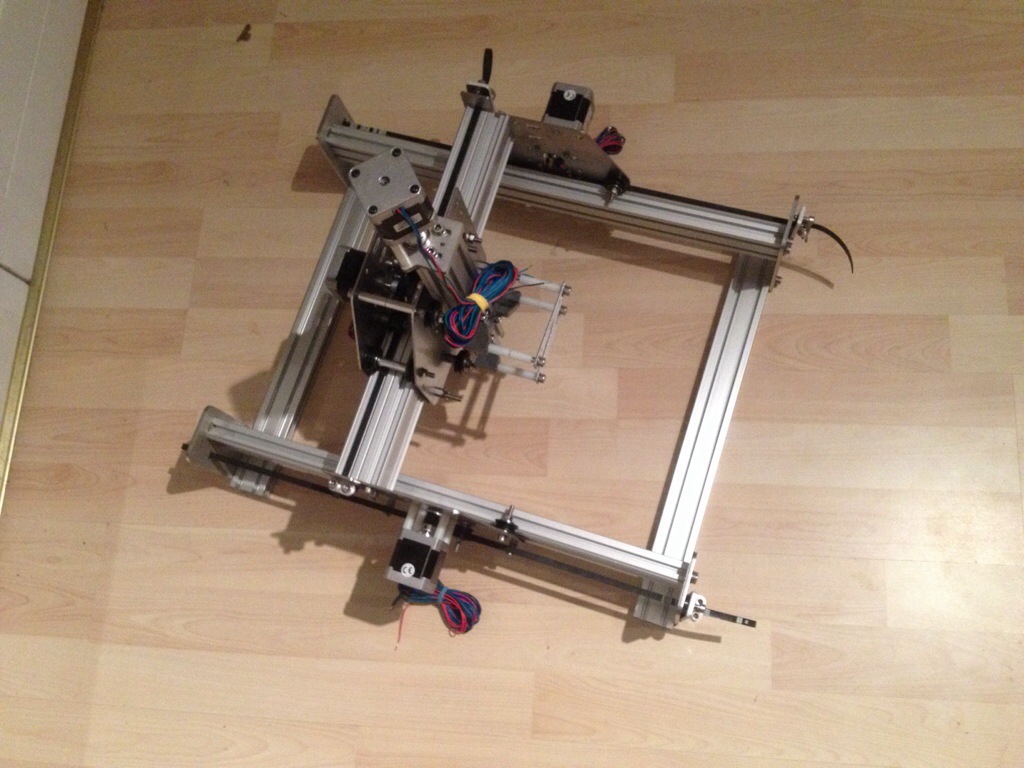
eShapeOko Testlauf