Nach dem ich den Rahmen und die Motoraufhänger gefräst hatte ging es nicht lange, bis ich den kompletten Quadcopter (Ich habe ihn mal Quadroder getauft) zusammengebaut hatte. Wie designed passten alle Teile 1A auf den Rahmen, so dass der Zusammenbau schnell und einfach von statten ging. Ich muss zugeben, dass das Projekt fast schon zu einfach zu bewerkstelligen war :).
Nach dem der Quadroder zusammengebaut war ging es an die Software und die Anbindung an die Fernbedienung. Was ich vorher nicht bemerkt hatte war, dass die Regler kein BEC haben, also keinen Strom über den Stecker, der zur Flight Control Naze32 geht führen. Das heisst, dass alles Strom hat, bis auf den Regler und der Empfänger. Also habe ich kurzerhand einen uBEC auf Ebay für 7€ geschossen und diesen eingebaut, damit alles soweit versorgt ist.
Die korrekten Anschlüsse für den Empfänger an der Naze32 zu finden war mit etwas Schwierigkeiten verbunden. Damit ich nicht noch mehr Kabel im Quadroder rumfliegen habe, habe ich mich dazu entschlossen die Signale mit einem einzigen Kabel zu übertragen (Summen Signal). Die Naze32 versteht das, wenn man diese vorher über USB verbindet und über Baseflight entsprechend konfiguriert.
Was allerdings noch fehlte und etwas Lötarbeit war, ist die Stromführung, denn schließlich muss jeder ESC mit 11,1V versorgt werden und zusätzlich noch der uBEC. Also habe ich einen Adapter gelötet, der einen Eingang und 10Ausgänge hat. Das war aber auch schon das einzige, was an Lötarbeiten getan werden musste.
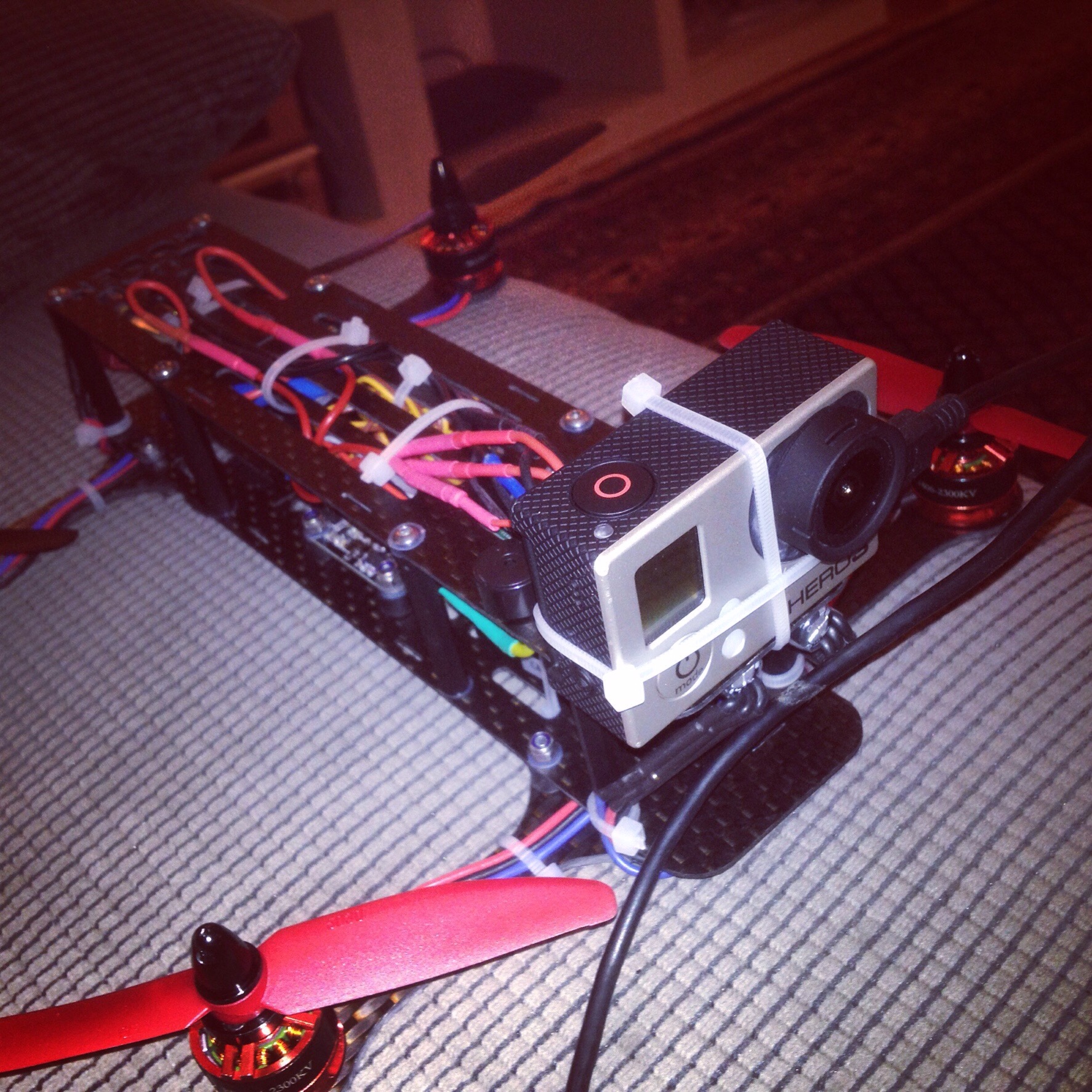
Hier mal ein paar Bilder vom Quadroder